Die Helmerttransformation wird verwendet, um die Koordinaten des Digitizers in die Sollkoordinaten der Datenbank umzusetzen. Die Transformation kann eine Translation, eine Rotation um kleine Winkel und eine Skalierung durchführen. Die Skalierung wird in X-Achse und Y-Achse mit demselben Maßstab durchgeführt. Die Transformation basiert auf einer Menge von Punkten (mindestens zwei), von denen die Koordinaten in beiden Systemen bekann sind. Sie werden identische Punkte genannt. Praktisch werden Die Punkte, deren Sollkoordinaten in der Datenbank bekann sind, z.B. die Eckpunkte eines Plans, digitalisiert, nachdem der Plan auf dem Digitizer fixiert wurde.
Achtung: x ist der Hochwert, y ist der Rechtswert.
Gegeben:
yAP,i
xAP,i Koordinaten der identischen Punkte im alten System
yNP,i
xNP,i Koorditanten der identischen Punkte im neuen System
yA
xA Koordinaten eines Punktes im alten System (vor der Transformation)
n Anzahl der identischen Punkte
Gesucht:
yN
xN Koordinaten des Punktes (yA,xA) nach der Transformation im neuen System)
Berechnung:
Der Schwerpunkt im alten System
Der Schwerpunkt im neuen System
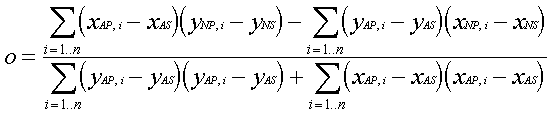
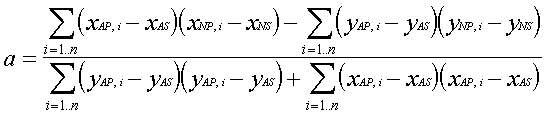
Die Transformationskonstanten o und a.
a ist die Änderung des Maßstabs, o ist die Rotation.
--------------------OLD_TEXT---------------------
The Helmerttransformation is used to move the co-ordinates of the Digitizers in the Sollkoordinaten of the data bank. The transformation can carry out a translation, a rotation around small corners and a Skalierung. The Skalierung is carried out in X axis and Y axis with the same graduation. The transformation is based on an amount from points (at least two) from which the co-ordinates are in both systems bekann. They are called identical points. Practically The points whose Sollkoordinaten are in the data bank bekann e.g. the corner points of a plan, are digitized, after the plan on the Digitizer was fixed.
Attention: x is the high-level value, y is the legal value.
Given:
yAP, i
xAP, i Co-ordinates of the identical points in the old system
yNP, i
xNP, i Koorditanten of the identical points in the new system
yA
xA Co-ordinates of a point in the old system (before the transformation)
n Number of the identical points
In request:
yN
xN Co-ordinates of the point (yA, xA) after the transformation in the new system)
Calculation:
The main focus in the old system
The main focus in the new system
The transformation constants o and a.
an is the change of the graduation, o is the rotation.